
The DARPA Gremlins initiative aims to demonstrate aerial launch and recovery of “swarms” of low-cost reusable unmanned aerial systems (UASs).
Dynetics, Inc., has successfully test-flown a second X-61A Gremlins Air Vehicle (GAV), as well as the Gremlins airborne recovery system, the company announced on Aug. 26, 2020. The testing was carried out last month at Dugway Proving Ground in Utah for the Defense Advanced Research Projects Agency (DARPA).
“The series of tests focused on risk reduction, as well as system and subsystem performance verification, in preparation for an airborne recovery test later this year. The overarching goal of the Gremlins Program, managed by DARPA’s Tactical Technology Office, is to demonstrate aerial launch and recovery of multiple low-cost reusable unmanned aerial systems (UASs). The test series involved all segments of the Gremlins Demonstration System, including GAVs, the launch and recovery system, the airborne operator control station and the Gremlins command, control and communications system. The test flight was originally scheduled for earlier this spring, but was delayed due to the global pandemic caused by COVID-19.”
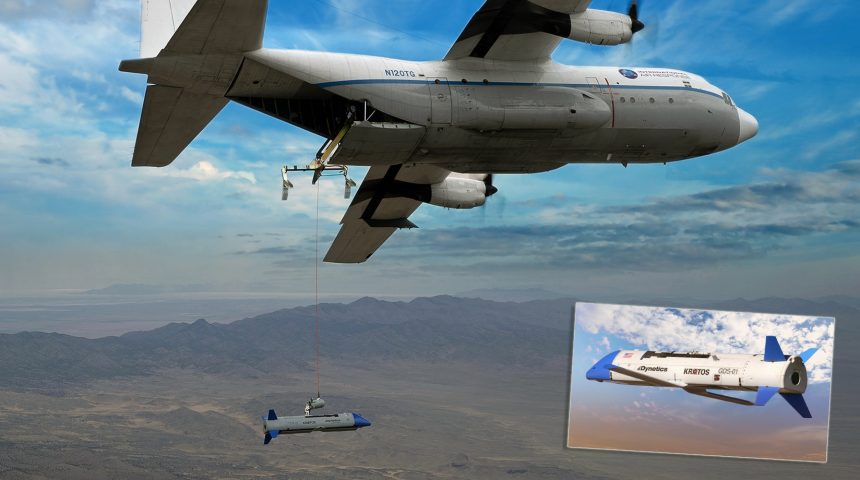
The second flight is a further step towards the airborne recovery of the GAV, that has not been accomplished yet: for the first time, the X-61A rendezvoused and flew in close formation with the recovery C-130 using the Gremlins Autonomous Docking System (GADS). The drone flew for a total flight time of 2 hours and 12 minutes; it flew in formation with the C-130 from as close as 125 feet back and 125 feet below the Hercules but, at the end of the test, it was recovered on the ground using the parachute system. This is still a milestone and a significant success compared to the first free flight, conducted on January 17, 2020, that was successful, but ended with the loss of the X-61A because of a failure of the main parachute that did not deploy during the recovery. Anyway, recovering the GAV in flight will be attempted later this year.
“While we successfully tested both the GAV and recovery system, we decided during the mission to stop short of docking,” said Brandon Hiller, Dynetics X-61A chief engineer. “We now have additional data, which will help us tune the system and further validate our models. These results are encouraging and present higher confidence to achieve airborne recovery in our next flight.”
Interestingly, the roll-on/roll-off recovery system (which includes the physical structure, the docking structure, the towed, attitude-controlled “Bullet” and the in-flight stowage system) performed as designed according to Dynetics. “As we expected, reeling the GAV in while docked on the Bullet, and then securing it inside the C-130 cargo bay is a safe and benign activity. It’s like fishing in the sky, except the fish weighs 1,200 pounds,” Marvin Hill, Dynetics X-61A recovery system chief engineer stated.
The new GAV should be integrated with the strike, reconnaissance, and cargo aircraft, as well as ground support systems. It is intended to support a variety of missions, including ISR (intelligence, surveillance and reconnaissance), mobile target attack, SEAD (suppression of enemy air defences), and close air support (CAS) missions.
They scenario?
Imagine a clandestine C-130 mothership (but in the future it could be either stealth or not, unmanned or piloted aicraft) dispensing a small swarm of drones in the vicinity of the target or area of interest. Each GAV can carry a max payload of 145 lbs (65.7 kg), enough for EO/IR (electro-optical/infrared) imaging systems, synthetic aperture radar (SAR), laser designator, electronic warfare support (EWS), electronic attack, or kinetic payloads. Depending on the loiter time, the GAV can cover a maximum radius of 25 (4 hours loiter) to 300NM (1 hour loiter time), reaching a max speed of Mach 0.6 and a max altitude of 40,000 feet. These are also re-usable and can be recovered at a max altitude of 20,000 feet. At the moment, each “mothership” can deploy 4 GAVs and recover as many as 8 GAVs.

According to DARPA, the Gremlin program “envisions launching groups of UASs from existing large aircraft such as bombers or transport aircraft—as well as from fighters and other small, fixed-wing platforms—while those planes are out of range of adversary defenses. When the gremlins complete their mission, a C-130 transport aircraft would retrieve them in the air and carry them home, where ground crews would prepare them for their next use within 24 hours.”
Managed by air and ground operator control stations, GAVs can geolocate the targets, relay the information to other assets via secure, anti-jam datalink and/or attack them and widening the path for the C-130 or for other assets. Once they have completed their preprogrammed mission, they can be retrieved by the mothership using a horizontal docking station.

Defending a target from swarms of low-observable drones, that can be lost at an acceptable cost, is going to be extremely complex, even for the most advanced air defenses. Especially when these swarms will incorporate AI (artificial intelligence) or the autonomous behaviors. Testing in this direction has already started: as we reported in 2017, the DoD in partnership with Naval Air Systems Command, tested the advanced swarming capability in 2016, launching more than 100 Perdix autonomous micro-drones from three F/A-18F Super Hornets over Naval Air Weapons Station China Lake, California.







